Why does gas mileage drop with new tires?
Jun 13, 2023, Posted by : Nia Latham
As a driver, I've often wondered why gas mileage tends to drop when I get new tires. After some research, I found out that this is mainly due to the increased rolling resistance of new tires. This resistance is caused by the deeper treads and stiffer sidewalls in new tires, which require more energy to move. In addition, the manufacturing process can leave a thin layer of lubricant on the tire surface, which further contributes to the increased resistance. Over time, as the treads wear down and the tires break in, the rolling resistance decreases and gas mileage improves.
 MORE
MORE
What are the pros and cons of health insurance?
May 30, 2023, Posted by : Nia Latham
As a blogger, I've been researching the pros and cons of health insurance and have discovered some important points. On the plus side, health insurance provides financial protection against expensive medical bills and ensures access to a range of healthcare services. However, the cons include high monthly premiums and potential limitations in coverage, which can leave some people with out-of-pocket expenses. Additionally, navigating the health insurance system can be complex and time-consuming. Overall, it's essential to weigh these factors when deciding whether or not health insurance is right for you.
 MORE
MORE
Did your health insurance cost go down with the ACA?
May 28, 2023, Posted by : Nia Latham
Ever since the ACA (Affordable Care Act) was implemented, I've been curious to see if my health insurance costs have actually decreased. After comparing my expenses, I realized that my monthly premiums have indeed gone down, but my out-of-pocket costs have increased. Additionally, I've also noticed that the coverage has expanded, particularly in terms of preventive care. In conclusion, while the ACA has lowered my monthly health insurance costs, it's crucial to consider the overall expenses and benefits before making a final judgment.
MOREIs the Federal Reserve a threat to American prosperity?
May 26, 2023, Posted by : Nia Latham
In my latest blog post, I explored the controversial question, "Is the Federal Reserve a threat to American prosperity?" After conducting thorough research and examining various perspectives, it's clear that opinions on this topic are quite divided. Some argue that the Federal Reserve's monetary policy decisions have helped stabilize the economy, while others claim it has overstepped its boundaries and created economic imbalances. In conclusion, the impact of the Federal Reserve on American prosperity is a complex and multifaceted issue that warrants further discussion and investigation. Stay tuned for more in-depth analysis on this topic in future blog posts!
 MORE
MORE
Do pegged interest rates benefit the economy in anyway?
May 24, 2023, Posted by : Nia Latham
In my latest blog post, I explored the topic of pegged interest rates and whether they benefit the economy in any way. From my research, I found that pegged interest rates can provide stability and predictability for businesses and consumers, making it easier for them to plan and invest. However, they can also limit a central bank's ability to respond to economic shocks and may lead to imbalances in the global economy. Ultimately, the effectiveness of pegged interest rates depends on the specific circumstances and goals of a country's economic policy. Be sure to check out the full blog post for a more in-depth analysis of this fascinating topic!
 MORE
MORE
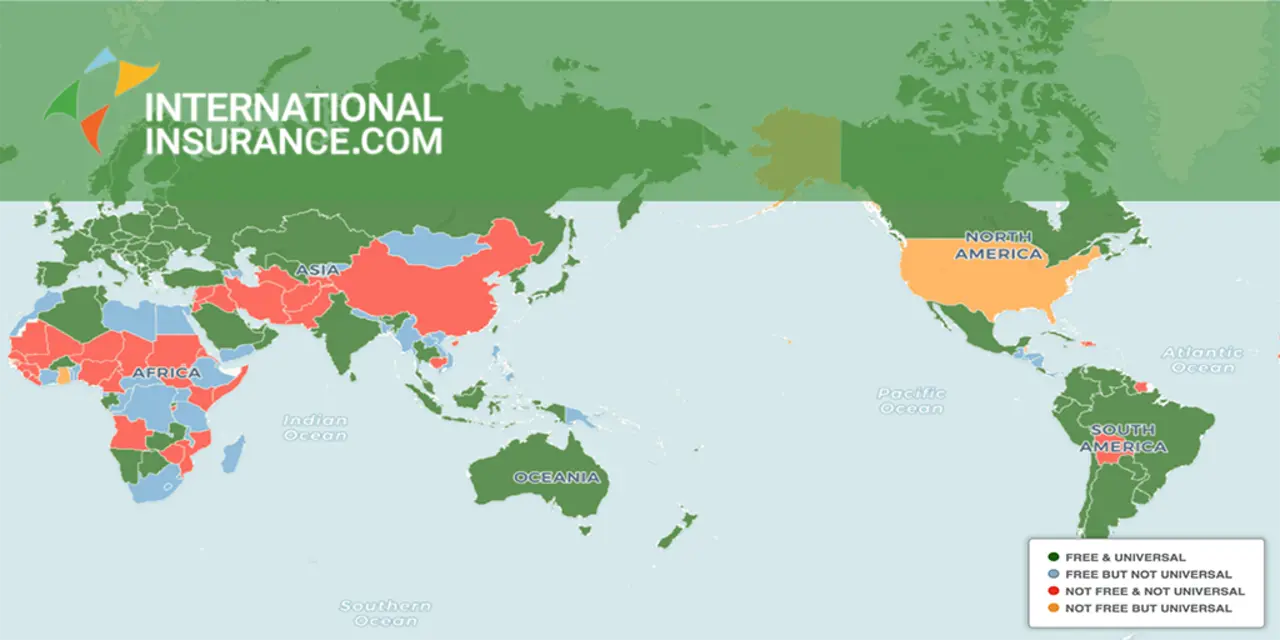
Does any state in the United States have free healthcare?
May 23, 2023, Posted by : Nia Latham
As a blogger researching healthcare in the United States, I've discovered that no state currently offers completely free healthcare. However, some states like California, Hawaii, and New York have made significant strides in providing affordable healthcare options for their residents. Medicaid expansion under the Affordable Care Act has also helped millions of low-income Americans access healthcare services. But despite these efforts, there is still no completely free healthcare system in any state. It's important for us to continue advocating for affordable and accessible healthcare for all Americans.
 MORE
MORE
Can you give an example of common law in health care system?
May 22, 2023, Posted by : Nia Latham
In the health care system, common law plays a crucial role in ensuring the rights and responsibilities of both patients and medical professionals. For instance, the principle of informed consent is a prime example of common law in action. This legal doctrine requires health care providers to provide their patients with clear and comprehensive information about the risks, benefits, and alternatives of a proposed treatment or procedure. This empowers patients to make informed decisions about their own care, while also protecting medical professionals from potential legal conflicts. Overall, common law helps to maintain a balance between the rights of patients and the responsibilities of health care providers.
 MORE
MORE
How much is a monthly car rental?
May 5, 2023, Posted by : Nia Latham
As a frequent traveler, I've often wondered how much a monthly car rental would cost. I looked into it and found that prices can vary widely depending on the car model, location, and rental company. On average, though, you can expect to pay anywhere from $500 to $1,500 per month for a standard vehicle. Keep in mind that additional fees, such as insurance and taxes, may also apply. It's always best to compare rates from different providers and book in advance to secure the best deal.
 MORE
MORE
How does the government make money from public health care?
Apr 27, 2023, Posted by : Nia Latham
As a copywriter, I often research various topics, and one that caught my attention recently is how governments make money from public health care. It turns out that governments primarily generate revenue through taxes, which can include income, sales, or even specific health care taxes. Additionally, they may receive funding from international organizations or through partnerships with private companies. Governments may also charge user fees for certain services, which contribute to their overall revenue. In essence, public health care systems are primarily funded by taxpayers, ensuring that essential services are available to everyone.
 MORE
MORE
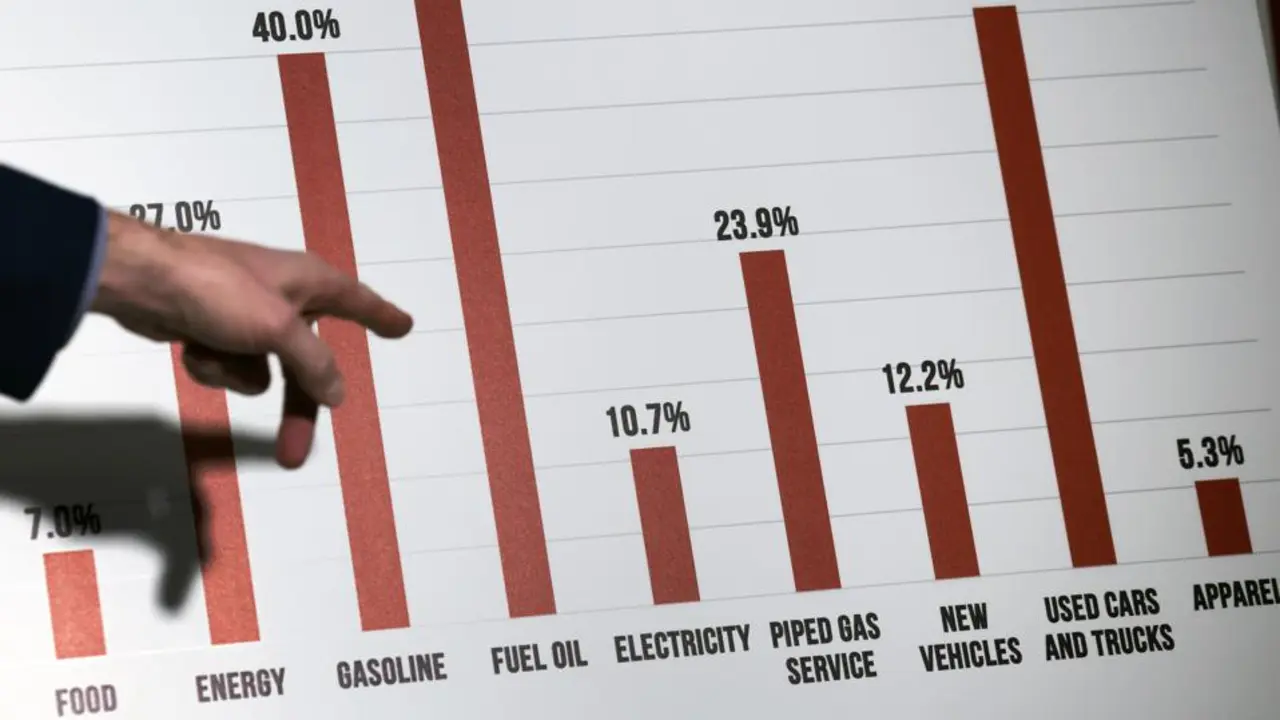
Why is having more inflation in the US economy a good idea?
Apr 25, 2023, Posted by : Nia Latham
Inflation is an important part of any healthy economy. It helps to boost economic activity, keep prices steady, and increase wages. In the US economy, having more inflation can be beneficial in several ways. It encourages businesses to invest in new projects, spurs consumer spending, and helps to keep wages and prices stable. It also helps to reduce the burden of debt and helps to increase the value of savings. Inflation is an important part of a healthy economy, and having more inflation in the US economy can lead to many positive outcomes.
 MORE
MORE